网红送餐机器人频繁出现在餐厅、酒店等场景,它们能够自主导航、避障和配送食物,吸引了不少关注。许多人可能认为这些机器人完全是‘无人操作’的智能体,但实际上,它们的‘智能’背后离不开大量的人工参与。这篇文章将探讨送餐机器人如何依赖人工支持,分析自动驾驶技术的核心难点,并简要介绍人工智能基础软件开发的要点。
一、没有人工,哪来的智能?
送餐机器人看似独立运行,实则其智能建立在人工基础之上。训练数据是人工智能模型的核心,例如机器人需要大量人工标注的图像和路径数据来学习识别障碍物和规划路线。硬件维护和软件更新依赖工程师的持续干预,包括传感器校准、算法优化和故障排除。伦理与安全监管也需要人工介入,以确保机器人在复杂环境中不引发事故。可以说,人工是智能的基石,而非替代品。
二、自动驾驶技术的难点
送餐机器人是自动驾驶技术的一个简化应用,而实际的道路自动驾驶面临更严峻挑战。主要难点包括:
- 复杂环境感知:自动驾驶系统需实时处理动态交通、天气变化和行人行为,现有传感器如激光雷达和摄像头在极端条件下仍易出错。
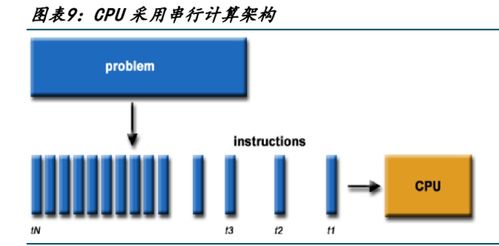
- 决策与路径规划:系统必须在毫秒内做出安全决策,权衡多种因素(如避障、交通规则),这需要高度可靠的算法和大量测试。
- 安全与可靠性:任何失误都可能导致严重后果,因此系统必须达到极高的冗余度和容错能力,这涉及到硬件和软件的深度集成。
- 法规与道德问题:自动驾驶需适应不同地区的法律框架,并解决道德困境(如事故时的责任归属),这需要跨领域的人工协作。
三、人工智能基础软件开发的关键
人工智能基础软件是支撑这些应用的引擎,开发过程强调数据、算法和部署的协同。要点包括:
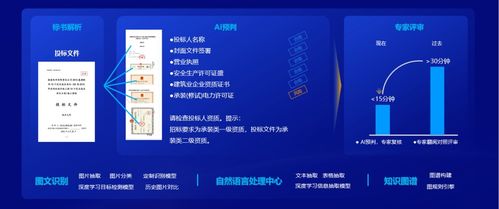
- 数据采集与预处理:通过人工或自动化方式收集高质量数据,并进行清洗和标注,以训练模型。
- 算法模型设计:使用深度学习、强化学习等技术开发核心功能,例如计算机视觉和自然语言处理,需不断迭代优化。
- 软件集成与测试:将模型嵌入到机器人或自动驾驶系统中,进行模拟和实地测试,确保稳定性和性能。
- 持续学习与更新:部署后,系统需通过在线学习机制适应新场景,这依赖于持续的软件维护和人工反馈循环。
网红送餐机器人是人工智能在现实世界的一个缩影,它提醒我们,智能并非凭空而来,而是人工智慧的延伸。自动驾驶技术的发展仍面临感知、决策和安全等多重障碍,而人工智能基础软件的进步将依赖于跨学科合作和持续创新。随着技术成熟,我们有望看到更自主的系统,但人工的角色始终不可或缺。